显隐性知识融合:AI规划与NLP整合综述
论文信息
| 字段 | 内容 |
|---|---|
| 标题 | Integrating AI Planning with Natural Language Processing: A Combination of Explicit and Tacit Knowledge |
| 作者 | Kebing Jin, Hankz Hankui Zhuo |
| 机构 | 中山大学计算机科学与工程学院 |
| 论文地址 | https://arxiv.org/abs/2202.07138 |
| 发表时间 | 2022年2月(v1),2023年4月(v2) |
一句话概要
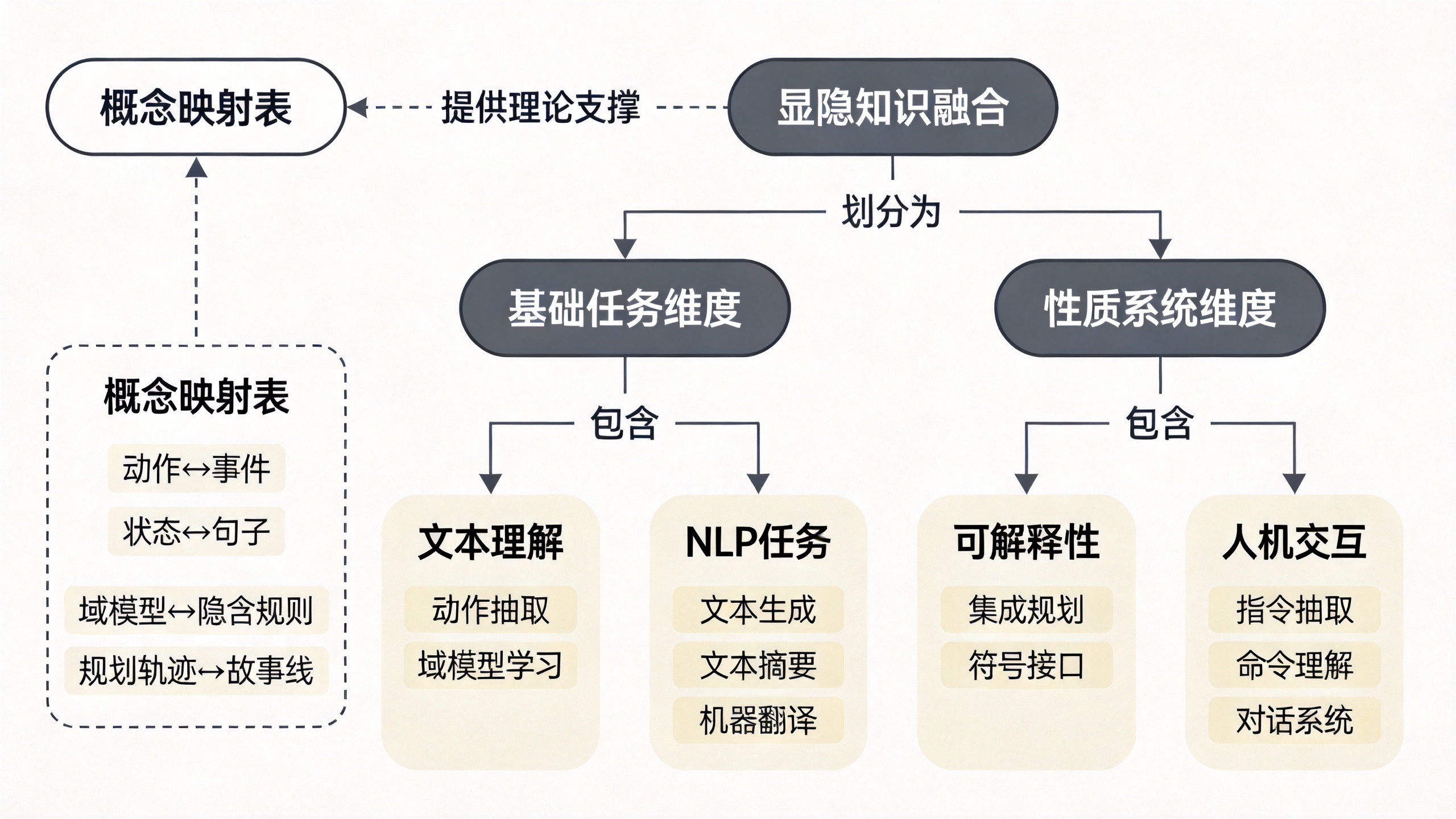
大规模语言模型在处理自然语言时面临可解释性与复杂性挑战。本文以"显性知识(AI规划生成的符号化规则)与隐性知识(神经网络从数据中习得的模式)之间存在互补关系"为核心洞察,首次系统综述了AI规划与自然语言处理在四个关键维度的整合路径:基于规划的文本理解(动作提取与领域模型学习)、基于规划的NLP任务(文本生成、摘要、翻译)、基于规划的可解释性、以及基于文本的人机交互。论文通过概念映射(如动作⇔事件、领域模型⇔隐含规则)揭示了两个领域的深层联系,勾勒了从"各自为政"到"协同共生"的研究图景。
背景与研究动机
自然语言处理的目标是实现智能体与人类之间的有效交互,当前的主流路径是构建大规模语言模型。作者指出,这类模型虽然在多种任务上取得了突破性进展,但其内部运作机制难以解释,且计算复杂度日益攀升。同时,单纯依赖统计模式学习的方式难以捕捉文本中蕴含的逻辑关系和因果结构。
AI规划作为符号化推理的代表,其核心是用形式化的语言(如PDDL)描述动作模型、状态转移和目标条件,通过规划器计算从初始状态到目标状态的动作序列。规划方法天然具有可解释性:每个动作的前提条件和效果都是明确定义的逻辑命题。然而,规划系统通常只能处理结构化数据,难以直接应对自然语言中的省略、倒装、歧义等现象。
论文的核心动机在于:深度学习擅长从非结构化文本中习得隐性知识(如词义、句法模式),但缺乏逻辑推理能力;AI规划擅长生成显性知识(如规则、领域模型),但难以从自然语言中自动构建这些知识。如果将两者结合,有望构建同时具备学习能力与推理能力的人工智能系统。作者引用了Kambhampati的观点来支撑这一方向:放弃显性知识、仅从隐性知识中学习一切是一种有损策略,显隐知识的协同才是更有效的路径。
现有方法的瓶颈
瓶颈一:自然语言处理缺乏可解释性与逻辑一致性。 当前基于深度学习的NLP方法本质上是黑箱拟合,虽然能生成流利的文本,但缺乏对语义规则的显式建模。例如,在故事生成任务中,纯神经模型生成的文本可能前后矛盾或逻辑断裂,因为模型没有能力保证动作序列的因果有效性。
瓶颈二:AI规划方法难以直接处理自然语言。 规划系统依赖精心构建的符号化领域模型和实例化描述,这些通常需要领域专家手动编写。从自然语言文本中自动抽取结构化信息并构建规划模型是一个极具挑战的问题,因为自然语言存在歧义、省略、一词多义等现象,现有解析工具在处理复杂文本时性能有限。
瓶颈三:两个领域之间缺乏有效的沟通桥梁。 尽管一些工作(如将规划用于文本生成、将强化学习用于动作抽取)尝试连接NLP和规划,但这些尝试往往是零散的、任务特定的,缺少一个统一的框架来系统性地理解两者的深层关系。研究者尚未充分认识到两者在概念层面的对应性(如动作序列⇔故事线、域模型⇔隐含规则),导致潜在的合作机会没有被充分发掘。
瓶颈四:可解释性与可控性的缺失。 在需要与人类合作的场景(如人机对话、机器人指令执行)中,黑箱模型无法向人类解释其决策过程。虽然规划方法天然具备可解释性,但如何将自然语言的语义映射到可解释的符号表示仍是一个开放问题。
核心洞察与贡献
论文的核心洞察是:AI规划与自然语言处理并非两个孤立的领域,它们在底层结构上存在深层的概念同构性。作者通过概念映射表(见表1)清晰地展示了这种对应关系:规划中的对象对应文本中的实体,状态对应句子或情境,动作对应事件,域模型对应隐含规则与转换关系,目标对应主题与议题,规划轨迹对应故事线与骨架。这种映射意味着,自然语言文本可以被理解为一种隐式的规划轨迹,而规划系统则可以视为一种高质量的文本骨架生成器。
基于这一洞察,论文贡献如下:
-
首次系统性地揭示了AI规划与NLP之间的深层联系。 作者指出这是第一篇从"显性与隐性知识结合"的视角审视两个领域交融的综述,弥补了此前缺乏统一框架的空白。
-
提出了一个四维整合框架。 将两个领域的交叉研究归纳为四条主线:规划辅助文本理解(动作抽取与域模型学习)、规划辅助NLP任务(文本生成、摘要、翻译)、规划辅助可解释性、以及文本驱动的人机交互。每条主线都对应着显性知识与隐性知识的一种交互模式。
-
绘制了概念映射表。 将规划系统的核心组件与自然语言文本的结构要素进行类比,为后续研究提供了"翻译"工具——一个研究领域的发现可以迁移到另一个领域。
-
系统梳理了各方向的关键挑战与未来方向。 在每个子方向之后,作者都独立讨论了该方向的挑战与前景,为后续研究者指明了值得突破的切入点。
-
强调了显隐知识结合的范式意义。 论文没有将规划与NLP的整合视为技术堆砌,而是提升到"知识表达范式"的高度——显性知识(规则)与隐性知识(统计模式)的协同是通向通用人工智能的必要路径。
Table 1. AI规划与自然语言处理中的相似概念
| AI规划 | 自然语言文本 |
|---|---|
| 对象 | 实体 |
| 状态 | 句子、情感、意图 |
| 动作 | 事件 |
| 域模型 | 隐含规则、转换、关系 |
| 目标 | 主题、议题 |
| 规划轨迹 | 故事线、骨架、框架 |
核心框架:四维整合体系
论文将AI规划与NLP的整合分解为四个相互关联的维度,每个维度代表一种特定的交互模式。以下按论文原框架展开,并附加作者的动机说明。
维度一:基于规划的文本理解
此维度的核心目标是将自然语言文本转换为结构化表示。论文将其进一步细分为两个子任务:动作抽取与域模型学习。
动作抽取的任务是从非结构化文本中提取由动词(动作名)和名词(参数)组成的动作序列。作者指出,早期方法依赖语义解析器和手工词汇资源,对文本简洁性要求高。近年来,EASDRL等基于深度强化学习的方法被提出,将文本视为"状态",将标签关联视为"动作",构建Q网络学习抽取策略。其关键创新在于将之前已抽取的动作作为状态的一部分,从而捕捉动作间的排他关系(exclusive)和可选关系(optional)。
域模型学习的任务是从文本中学习规划所用的符号化动作模型(前提条件和效果)。方法通常先通过句法解析抽取动词和对象,然后根据出现顺序发现因果关系。论文指出,叙事文本与说明性文本的学习难度不同——叙事文本存在省略和代词指代,需要特殊处理规则。一些工作(如Hayton等人)提出两套规则处理代词,然后使用模板构造PDDL模型。
作者强调,此维度的核心挑战在于自然语言中的关系比规划中的前提-效果约束更灵活,而且同一事件可用不同词语表达,同一词语可有不同含义。这意味着精确提取隐含逻辑关系极为困难。
维度二:基于规划的NLP任务
论文归纳了三个具体的NLP任务:文本生成、文本摘要、机器翻译。这些任务的共同特点是需要在生成过程中保证逻辑连贯性和结构一致性。
文本生成被分为两种范式:符号规划方法与神经规划方法。符号规划方法(如IPOCL、CPOCL)使用手工构建的域模型进行规划,能够生成因果一致的故事线,但需要大量领域知识。神经规划方法则自动学习骨架或故事线,再通过神经生成器扩展为完整文本。典型代表包括Plan-and-Write框架(先规划关键词序列,再生成故事)和DYPLOC(动态选择与排序内容项)。
文本摘要的规划化方法首先规划骨架(如实体链、句子级表示),再基于骨架生成摘要。例如,Narayan等人先计算实体链作为计划,Marfurt等人使用层次解码器规划下一句的表示。
机器翻译的规划方法先规划"大图"(如动作矩阵、计划器码),再生成目标语言文本。Gülçehre等人提出结合自编码器与规划机制,先创建概率分布形式的计划,再按计划生成翻译。
作者整体认为,这些任务中的"规划"目前仍主要基于神经网络的概率预测,尚未真正引入符号化逻辑推理,这是一个值得突破的方向。
维度三:基于规划的可解释性
此维度聚焦于如何利用AI规划生成的显性知识(规则、故事线、动作序列)来增强神经AI系统的透明性。作者指出了两种路径:一是将规划技术直接集成到AI系统中(如EXPAND系统利用人类评估反馈和视觉解释加速深度强化学习);二是构建人类可理解的符号接口(如SERLfD框架使用自解释机制识别有价值的高层关系特征)。
论文引用Kambhampati等人的观点指出,符号可以作为连接人类与AI的通用语(lingua franca),让系统在决策过程中考虑人类的心智模型。值得注意的是,这一部分的文献量较小,反映了该方向仍处于早期阶段。
维度四:基于文本的人机交互
人机交互维度是前面三个维度的应用体现。论文将其分解为三个具体场景:
- 从自然语言指令中抽取动作:与维度一的动作抽取类似,但需要进一步考虑机器人的执行能力。G3系统构建概率图模型将命令映射为计划。
- 自然语言命令理解:不仅需要理解语义,还需要捕捉隐含规则并学习新动作。LIA智能体在遇到未知命令时通过自然语言对话请求解释,并增量学习。
- 对话系统:基于规划的方法将识别对话中的意图作为核心,利用规则和计划管理语篇。但规划驱动的对话系统仍面临开放域表示复杂、手工构建模型困难等挑战。
论文强调,在这个维度中,规划方法擅长的"捕获和表达规则"的能力与NLP擅长的"从有限数据中泛化"的能力形成互补。
文献分析与评估
分类框架的合理性
论文提出的四维分类具有清晰的逻辑层级:文本理解是基础层(将非结构化文本结构化),NLP任务是应用层(利用结构化骨架生成文本),可解释性是性质层(使模型可理解),人机交互是系统层(将前三个维度整合到实际系统中)。这种"基础-应用-性质-系统"的递进结构有一定说服力。不过,各维度之间存在大量重叠——例如,文本理解中的动作抽取与人机交互中的动作抽取几乎完全相同,论文实际上将其作为两个子方向重复讨论,这削弱了分类的排他性。
文献覆盖的全面性
论文引用了约130篇参考文献,时间跨度从20世纪80年代到2022年,涵盖了经典规划工作(IPOCL、PDDL)和最新的语言模型规划研究(Huang等人的零样本规划工作)。在文本生成部分覆盖了符号规划和神经规划两条路线的主要代表作,在文本摘要和翻译部分的覆盖面相对较浅(仅各例举了3-5篇论文)。机器翻译部分尤其薄弱,仅用少量工作代表"规划阶段"的存在。整体而言,文献覆盖在广度上较好,但在某些子方向的深度上存在不均匀。
批判性观点是否有据可查
论文在每章末尾都设有"挑战与前景"小节,提出了有针对性的批判性观点。例如,作者指出当前规划辅助NLP任务仍主要依赖神经网络的概率预测,没有真正实现符号推理;也指出规划驱动的对话系统在开放域中缺乏可扩展性。这些观点基于对现有方法局限性的分析,有据可查,并非空泛批评。
对核心论点的支撑程度
论文的核心理念——显隐知识结合——贯穿全文,但更多停留在"提出方向"和"例证"层面,缺乏对结合效果的定量比较或系统评估。例如,没有数据表明规划辅助的文本生成相比纯神经方法在逻辑一致性上有多少提升。这削弱了核心论点的实证支撑。作为综述,这可以理解,但读者需要意识到论文的目标是构建框架而非验证假设。
隐含假设的反思
论文隐含地假设"规则是好的"“显性知识优于隐性知识”,但没有讨论规则可能存在的局限性:手工规则难以覆盖所有情况,自动学习的规则可能包含噪声,过度依赖规划可能导致生成文本僵硬、缺乏创造力。此外,对于大型语言模型(如GPT系列)在2022年后展现出的惊人推理能力,论文的预设(即纯神经模型无法推理)可能需要重新审视。
优势与局限性
优势
- 首个系统性整合框架。 论文确实填补了将规划与NLP作为一个整体领域来审视的空白,为后续跨领域研究提供了分类基准和共同语言。
- 概念映射表具有理论价值。 将规划组件与文本要素的类比形式化,为研究者提供了一种"翻译"思路——一个领域的发现可以通过映射应用于另一个领域。
- 未来方向讨论务实。 论文在每个子章节末尾都讨论了具体挑战,而非泛泛而谈,这些方向(如自动构建域模型、受控文本生成、规划驱动的对话系统)具有可操作性。
局限性
- 文献覆盖存在时效性局限。 论文的主要工作完成于2021年前后,此后GPT-3的涌现能力、Chain-of-Thought推理、Toolformer等将语言模型与外部工具结合的工作均未涉及。这些新进展可能改变论文对两者关系的某些结论(例如,语言模型本身开始具备隐式规划能力)。
- 分类框架存在重叠与遗漏。 人机交互维度与文本理解维度中的动作抽取高度重叠,而一些重要的交叉领域(如规划辅助多模态NLP、规划辅助代码生成)未被纳入。
- 缺乏实证比较。 论文没有提供任何定量的性能对比或案例研究来证明"结合规划与NLP"比"单独使用任一方法"更好。这使得论文更像一份"未来研究提案"而非"已验证有效的方法总结"。
- 对可解释性的讨论较为表面。 可解释性部分仅引用了少量工作,且未深入讨论如何评估可解释性、规划提供的解释是否真的让人类理解等问题。
- 可复现性受限。 论文未提供代码或数据集,所引用的工作虽有部分开源,但作为综述而言,读者难以复现其分析过程或验证其分类的稳健性。
未来方向与开放问题
论文自身指出了若干未来方向,结合分析可进一步提炼如下:
方向一:真正实现显隐知识的端到端结合。 当前大多数"规划+NLP"方法仍然是将规划作为一种预处理或后处理模块,本质上依然是两个独立系统的拼接。如何构建一个能够同时进行符号推理和统计学习的统一框架,让知识在显性和隐性表征之间自由转化,是论文提出的核心开放问题。
方向二:从文本自动学习精确的规划域模型。 现有方法从文本中学习的模型往往存在冗余(如同义词导致的重复谓词)和错误(如错误的前提条件推断),且无法处理动态环境。论文提到"将规则形式化为前提条件-效果结构"可能是一个突破点,但具体技术路径尚不明确。
方向三:在NLP任务中引入更强的逻辑约束。 当前规划辅助的文本生成、摘要、翻译等方法仍将规划视为"概率分布"或"注意力先验",而不是真正的推理过程。作者认为,结合符号推理来保证生成文本的因果一致性(而非统计一致性)是一个值得探索的方向。
方向四:规划驱动的可控对话生成与可解释对话系统。 论文指出规划在对话系统中仍处于早期阶段,挑战在于开放域表示的复杂性和手工建模的困难。如果能结合自动域模型学习与搜索策略,可能实现更可控的对话生成,同时发挥规划的可解释性优势。
方向五:大规模语言模型与规划系统的协同。 论文第2.4节简要讨论了语言模型作为规划器的工作(如Huang等人2022年的零样本规划),但未深入探讨。这一方向在本文发表后迅速发展——语言模型可以被用作隐式规划器的前端理解模块,也可以作为规划域自动生成的引擎。这种新范式可能部分改变了论文中关于"显隐知识对立"的基本假设。
组会预判问答
问题1:这篇综述提出的四维分类是否具有唯一性?文本理解与人机交互中的动作抽取部分高度重叠,是否可以合并?
论文在两个小节中分别讨论了动作抽取,但动机不同:文本理解中的动作抽取是为了将非结构化文本转化为结构化的动作序列,属于"理解"阶段;人机交互中的动作抽取则是为了将动作序列直接交给机器人执行,属于"执行"阶段。虽然技术方法相似,但目标不同。一种可能的解读是,论文试图强调同一个技术可以在不同应用场景中复用,但这种重复讨论确实降低了分类的清晰度。如果从功能层次重新组织,或许可将动作抽取视为一个独立的基础模块,然后在其上构建理解、生成、交互等应用层。
问题2:论文声称"这是第一篇探讨AI规划与NLP深层联系的综述",这个声明的可靠性如何?
据论文引用的文献,此前确实没有以"显隐知识结合"为统一视角来系统地讨论两个领域交叉的综述。早期工作(如Geib & Steedman 2007、Wilensky 1981)虽然讨论了NLP与规划识别的关系,但范围有限。近期的综述(如Young 2013关于叙事规划的)也仅聚焦于故事生成。因此,论文的声明在2022年发表的语境下是合理的。但需要注意,此后出现了更多相关综述(如关于LLM规划能力的综述),可能会削弱这一声明的独特性。
问题3:论文对大规模语言模型的讨论非常有限,这是否意味着该综述已经过时?
论文完成于GPT-3之后、GPT-4之前的时间窗口,当时LLM的推理能力尚未被充分认识。论文将"语言模型作为规划器"放在2.4节作为背景,而非作为核心整合路径,这一处理方式反映了当时的学术共识。然而,2023年后涌现的Chain-of-Thought、ReAct等方法证明LLM可以通过提示工程实现一定程度的显式推理。这并不意味着论文的核心洞察失效,而是表明显隐知识结合的方式可能比论文设想得更加多元——语言模型本身可能充当了"隐式显性推理器"的角色。对于当前研究者而言,这篇综述的价值在于理解规划与NLP结合的历史根基和基础框架,而最新的LLM规划能力可作为该框架的补充。
问题4:综述缺少对"结合效果"的定量比较,如何判断这种方法论真的有效?
这确实是该综述的一个局限。论文采用了定性的文献总结和分类方法,没有像荟萃分析(meta-analysis)那样汇总不同方法的性能指标。一种可能的解释是,综述涉及的子方向跨度大,各任务的评估指标不统一(如文本生成用BLEU/ROUGE/人工评估,规划用求解成功率/规划长度),难以直接比较。对于读者而言,这篇综述更适合作为"研究路线图"而非"方法排名榜"。如果想评估规划辅助NLP的实际效果,需要进一步查阅论文引用的原始实验文献(如EASDRL、Plan-and-Write等)中的消融实验——这些原始论文通常会对比有无规划模块的性能差异。
本报告由立理AI生成,仅供参考,请以原文为准。